
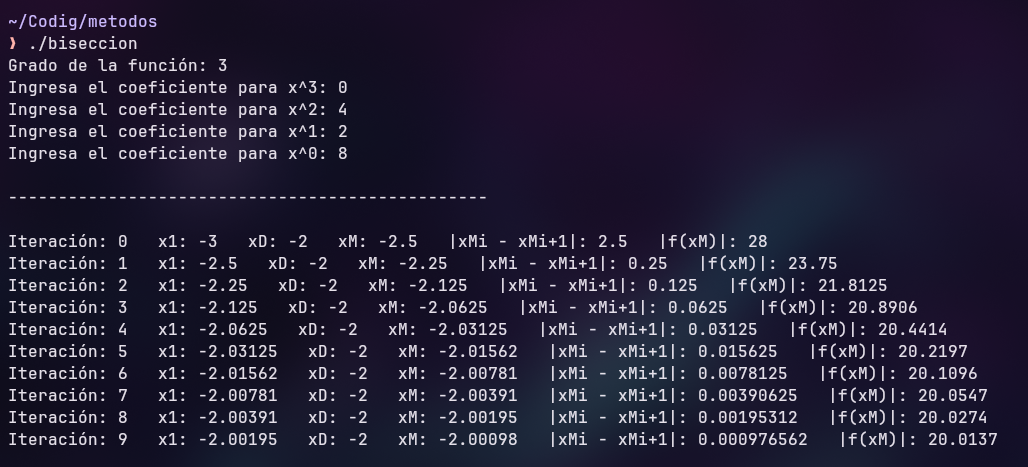
Método: Bisección
#include <iostream> #include <cmath> using namespace std; double f(double x) { return x * x * x - x - 2; } int main() { double a = 1.0, b = 2.0; double tol = 1e-6; int maxIter = 100; if (f(a) * f(b) >= 0) { cout << "No hay raíz garantizada en [a,b]" << endl; return 1; } double c; for (int i = 0; i < maxIter; i++) { c = (a + b) / 2.0; cout << "Iter " << i + 1 << ": c = " << c << " f(c) = " << f(c) << endl; if (fabs(f(c)) < tol || (b - a) / 2 < tol) break; // Convergió if (f(a) * f(c) < 0) b = c; else a = c; } cout << "Raíz aproximada: " << c << endl; return 0; }
Salida esperada:
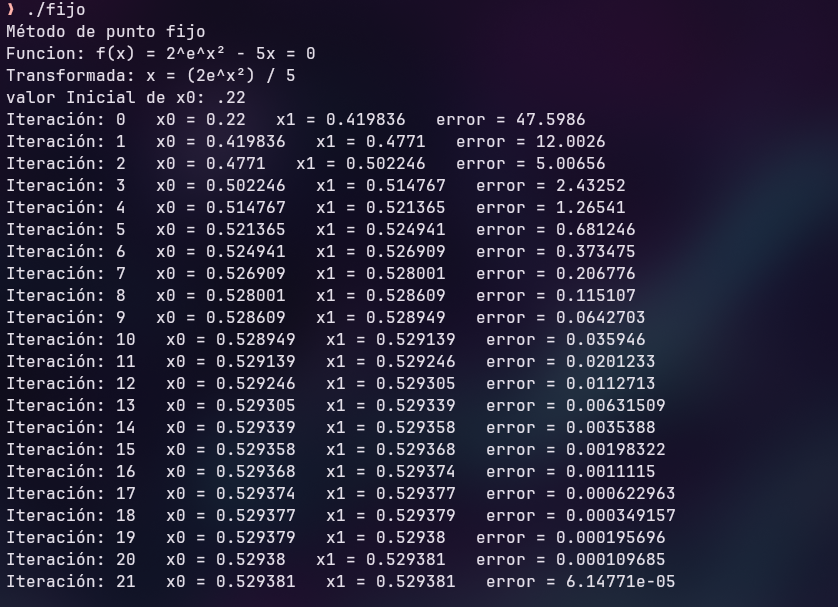
Método: Punto fijo
#include <iostream> #include <cmath> using namespace std; double g(double x) { return cbrt(x + 2); } int main() { double x = 1.5; double tol = 1e-6; int maxIter = 100; double xNuevo; for (int i = 0; i < maxIter; i++) { xNuevo = g(x); cout << "Iter " << i + 1 << ": x = " << xNuevo << " |error| = " << fabs(xNuevo - x) << endl; if (fabs(xNuevo - x) < tol) break; x = xNuevo; } cout << "Punto fijo (raíz): " << xNuevo << endl; return 0; }
Salida esperada:
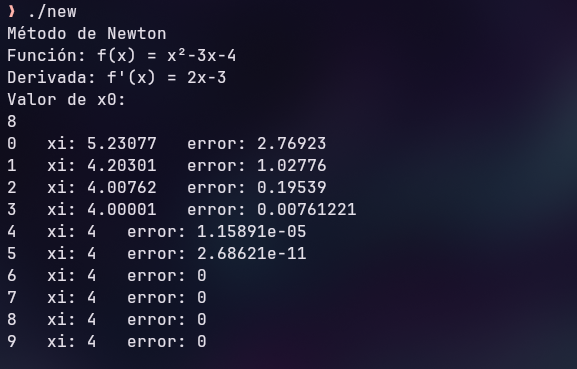
Método: Newton
#include <iostream> #include <cmath> using namespace std; double f(double x) { return x * x * x - x - 2; } double df(double x) { return 3 * x * x - 1; } int main() { double x = 1.5; double tol = 1e-8; for (int i = 0; i < 50; i++) { double fx = f(x); double dfx = df(x); if (fabs(dfx) < 1e-12) { cout << "Derivada nula, el método falla." << endl; return 1; } double xNuevo = x - fx / dfx; cout << "Iter " << i + 1 << ": x = " << xNuevo << " f(x) = " << f(xNuevo) << endl; if (fabs(xNuevo - x) < tol) break; x = xNuevo; } cout << "Raíz: " << x << endl; return 0; }
Salida esperada:
Método: Gauss
#include <iostream> #include <cmath> using namespace std; const int N = 3; int main() { double mat[N][N + 1] = { {2, 1, -1, 8}, {-3, -1, 2, -11}, {-2, 1, 2, -3} }; for (int col = 0; col < N; col++) { int pivot = col; for (int row = col + 1; row < N; row++) if (fabs(mat[row][col]) > fabs(mat[pivot][col])) pivot = row; swap(mat[col], mat[pivot]); for (int row = col + 1; row < N; row++) { double factor = mat[row][col] / mat[col][col]; for (int k = col; k <= N; k++) mat[row][k] -= factor * mat[col][k]; } } double x[N] = {0}; for (int i = N - 1; i >= 0; i--) { x[i] = mat[i][N]; for (int j = i + 1; j < N; j++) x[i] -= mat[i][j] * x[j]; x[i] /= mat[i][i]; } cout << "Solución:" << endl; for (int i = 0; i < N; i++) cout << "x[" << i << "] = " << x[i] << endl; return 0; }
Salida esperada:

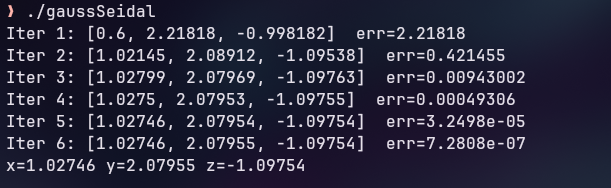
Método: Gauss Seidel
#include <iostream> #include <cmath> using namespace std; const int N = 3; int main() { double A[N][N] = { {10, -1, 2}, { 1, 11, -1}, { 2, -1, 10} }; double b[N] = {6, 25, -11}; double x[N] = {0, 0, 0}; double tol = 1e-6; for (int iter = 0; iter < 100; iter++) { double maxErr = 0; for (int i = 0; i < N; i++) { double suma = b[i]; for (int j = 0; j < N; j++) if (j != i) suma -= A[i][j] * x[j]; double xNew = suma / A[i][i]; maxErr = max(maxErr, fabs(xNew - x[i])); x[i] = xNew; } cout << "Iter " << iter + 1 << ": [" << x[0] << ", " << x[1] << ", " << x[2] << "] err=" << maxErr << endl; if (maxErr < tol) break; } cout << "x=" << x[0] << " y=" << x[1] << " z=" << x[2] << endl; return 0; }
Salida esperada:
Método: Determinante
#include <iostream> #include <cmath> using namespace std; const int N = 3; double determinante(double mat[N][N]) { double temp[N][N]; for (int i = 0; i < N; i++) for (int j = 0; j < N; j++) temp[i][j] = mat[i][j]; double det = 1.0; int signo = 1; for (int col = 0; col < N; col++) { int pivot = col; for (int row = col + 1; row < N; row++) if (fabs(temp[row][col]) > fabs(temp[pivot][col])) pivot = row; if (pivot != col) { swap(temp[col], temp[pivot]); signo = -signo; } if (fabs(temp[col][col]) < 1e-12) return 0; det *= temp[col][col]; for (int row = col + 1; row < N; row++) { double f = temp[row][col] / temp[col][col]; for (int k = col; k < N; k++) temp[row][k] -= f * temp[col][k]; } } return signo * det; } int main() { double A[N][N] = {{1, 2, 3}, {4, 5, 6}, {7, 2, 9}}; cout << "det(A) = " << determinante(A) << endl; return 0; }
Salida esperada:
Método: Descomposición Lu
#include <iostream> using namespace std; const int N = 3; int main() { double A[N][N] = {{2, 1, -1}, {-3, -1, 2}, {-2, 1, 2}}; double b[N] = {8, -11, -3}; double L[N][N] = {}, U[N][N] = {}; for (int i = 0; i < N; i++) { L[i][i] = 1.0; for (int k = i; k < N; k++) { double s = 0; for (int p = 0; p < i; p++) s += L[i][p] * U[p][k]; U[i][k] = A[i][k] - s; } for (int k = i + 1; k < N; k++) { double s = 0; for (int p = 0; p < i; p++) s += L[k][p] * U[p][i]; L[k][i] = (A[k][i] - s) / U[i][i]; } } double y[N] = {}; for (int i = 0; i < N; i++) { double s = b[i]; for (int j = 0; j < i; j++) s -= L[i][j] * y[j]; y[i] = s; } double x[N] = {}; for (int i = N - 1; i >= 0; i--) { double s = y[i]; for (int j = i + 1; j < N; j++) s -= U[i][j] * x[j]; x[i] = s / U[i][i]; } for (int i = 0; i < N; i++) cout << "x[" << i << "] = " << x[i] << endl; return 0; }
Salida esperada:
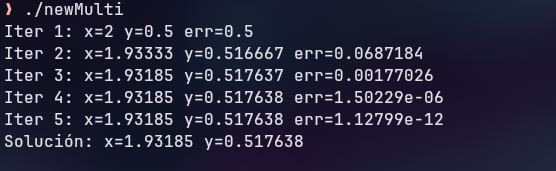
Método: Newton multivariable
#include <iostream> #include <cmath> using namespace std; const int N = 2; void evalF(double x, double y, double f[N]) { f[0] = x * x + y * y - 4; f[1] = x * y - 1; } void evalJ(double x, double y, double J[N][N]) { J[0][0] = 2 * x; J[0][1] = 2 * y; J[1][0] = y; J[1][1] = x; } void solve2x2(double J[N][N], double f[N], double dx[N]) { double det = J[0][0] * J[1][1] - J[0][1] * J[1][0]; dx[0] = (-f[0] * J[1][1] + f[1] * J[0][1]) / det; dx[1] = (-f[1] * J[0][0] + f[0] * J[1][0]) / det; } int main() { double x = 1.5, y = 0.5; for (int i = 0; i < 50; i++) { double f[N], J[N][N], dx[N]; evalF(x, y, f); evalJ(x, y, J); solve2x2(J, f, dx); x += dx[0]; y += dx[1]; double err = sqrt(dx[0] * dx[0] + dx[1] * dx[1]); cout << "Iter " << i + 1 << ": x=" << x << " y=" << y << " err=" << err << endl; if (err < 1e-8) break; } cout << "Solución: x=" << x << " y=" << y << endl; return 0; }
Salida esperada:
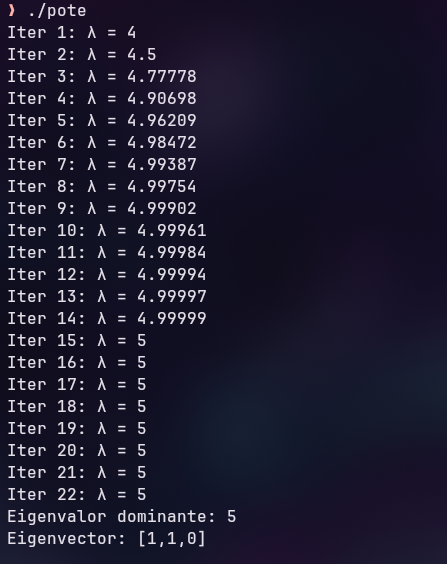
Método: Potencias
#include <iostream> #include <cmath> using namespace std; const int N = 3; void matvec(double A[N][N], double v[N], double w[N]) { for (int i = 0; i < N; i++) { w[i] = 0; for (int j = 0; j < N; j++) w[i] += A[i][j] * v[j]; } } int main() { double A[N][N] = {{4, 1, 0}, {2, 3, 0}, {0, 0, 5}}; double v[N] = {1, 0, 0}; double lambda = 0, tol = 1e-8; for (int i = 0; i < 100; i++) { double w[N]; matvec(A, v, w); // w = A·v double lNew = 0; for (int k = 0; k < N; k++) lNew = max(lNew, fabs(w[k])); for (int k = 0; k < N; k++) v[k] = w[k] / lNew; cout << "Iter " << i + 1 << ": λ = " << lNew << endl; if (fabs(lNew - lambda) < tol) { lambda = lNew; break; } lambda = lNew; } cout << "Eigenvalor dominante: " << lambda << endl; cout << "Eigenvector: ["; for (int i = 0; i < N; i++) cout << v[i] << (i < N - 1 ? "," : ""); cout << "]" << endl; return 0; }
Salida esperada:
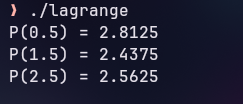
Método: Polinomio de lagrange
#include <iostream> using namespace std; double lagrange(double xs[], double ys[], int n, double x) { double resultado = 0; for (int i = 0; i < n; i++) { double Li = 1.0; for (int j = 0; j < n; j++) { if (j != i) Li *= (x - xs[j]) / (xs[i] - xs[j]); } resultado += ys[i] * Li; } return resultado; } int main() { double xs[] = {0, 1, 2, 3}; double ys[] = {1, 3, 2, 5}; int n = 4; double pts[] = {0.5, 1.5, 2.5}; for (double xp : pts) cout << "P(" << xp << ") = " << lagrange(xs, ys, n, xp) << endl; return 0; }
Salida esperada:
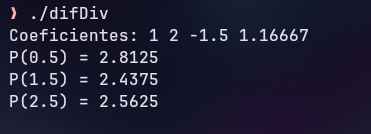
Método: Diferencias divididas
#include <iostream> using namespace std; const int N = 4; int main() { double x[N] = {0, 1, 2, 3}; double y[N] = {1, 3, 2, 5}; double dd[N][N] = {}; for (int i = 0; i < N; i++) dd[i][0] = y[i]; for (int j = 1; j < N; j++) for (int i = 0; i < N - j; i++) dd[i][j] = (dd[i + 1][j - 1] - dd[i][j - 1]) / (x[i + j] - x[i]); cout << "Coeficientes: "; for (int k = 0; k < N; k++) cout << dd[0][k] << " "; cout << endl; auto evalP = [&](double xp) { double p = dd[0][N - 1]; for (int k = N - 2; k >= 0; k--) p = p * (xp - x[k]) + dd[0][k]; return p; }; cout << "P(0.5) = " << evalP(0.5) << endl; cout << "P(1.5) = " << evalP(1.5) << endl; cout << "P(2.5) = " << evalP(2.5) << endl; return 0; }
Salida esperada:
Método: Trapecio
#include <iostream> #include <cmath> using namespace std; double f(double x) { return x * x; // f(x) = x² } int main() { double a = 0.0, b = 1.0; int n = 2; double h = (b - a) / n; double suma = f(a) + f(b); for (int i = 1; i < n; i++) suma += 2 * f(a + i * h); double integral = (h / 2) * suma; cout << "Integral aproximada: " << integral << endl; return 0; }
Salida esperada:

Método: Simpson
#include <iostream> #include <cmath> using namespace std; double f(double x) { return x * x; // f(x) = x² } int main() { double a = 0.0, b = 1.0; int n = 2; // debe ser par double h = (b - a) / n; double suma = f(a) + f(b); for (int i = 1; i < n; i++) { double x = a + i * h; suma += (i % 2 == 0) ? 2 * f(x) : 4 * f(x); } double integral = (h / 3) * suma; cout << "Integral aproximada: " << integral << endl; return 0; }
Salida esperada:

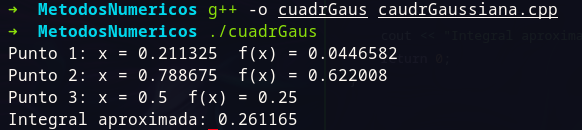
Método: Cuadratura Gaussiana
#include <iostream> #include <cmath> using namespace std; double f(double x) { return x * x; // f(x) = x² } int main() { // Puntos y pesos Gauss-Legendre de 2 puntos double t[] = {-0.577350269, 0.577350269}; double w[] = {1, 1}; double a = 0.0, b = 1.0; double integral = 0; for (int i = 0; i < 3; i++) { double x = ((b - a) * t[i] + (b + a)) / 2; integral += w[i] * f(x); cout << "Punto " << i + 1 << ": x = " << x << " f(x) = " << f(x) << endl; } integral *= (b - a) / 2; cout << "Integral aproximada: " << integral << endl; return 0; }
Salida esperada:
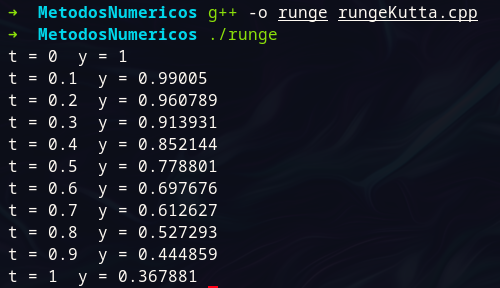
Método: Runge-Kutta (cuarto orden)
#include <iostream> #include <cmath> using namespace std; // dy/dt = f(t, y) double f(double t, double y) { return -2 * t * y; } int main() { double t = 0.0, y = 1.0; double h = 0.1; int n = 10; cout << "t = " << t << " y = " << y << endl; for (int i = 0; i < n; i++) { double k1 = h * f(t, y); double k2 = h * f(t + h / 2, y + k1 / 2); double k3 = h * f(t + h / 2, y + k2 / 2); double k4 = h * f(t + h, y + k3); y += (k1 + 2 * k2 + 2 * k3 + k4) / 6; t += h; cout << "t = " << t << " y = " << y << endl; } return 0; }
Salida esperada:
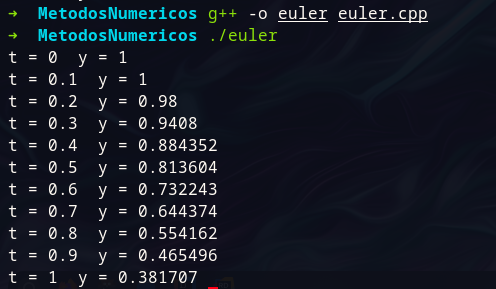
Método: Euler
#include <iostream> #include <cmath> using namespace std; // dy/dt = f(t, y) double f(double t, double y) { return -2 * t * y; } int main() { double t = 0.0, y = 1.0; double h = 0.1; int n = 10; cout << "t = " << t << " y = " << y << endl; for (int i = 0; i < n; i++) { y = y + h * f(t, y); t += h; cout << "t = " << t << " y = " << y << endl; } return 0; }
Salida esperada:
Método: Serie de Taylor
#include <iostream> #include <cmath> using namespace std; int main() { double x = 0.5; double aprox = x - (pow(x,3) / 6) + (pow(x,5) / 120); cout << "sen(0.5) aproximado = " << aprox << endl; cout << "Valor real = " << sin(x) << endl; return 0; }
Salida esperada:

Método: Euler
#include <iostream> using namespace std; double f(double x, double y) { return x - y; } int main() { double x = 0, y = 1; double h = 0.2; for(int i = 0; i < 5; i++) { y = y + h * f(x,y); x = x + h; cout << "x = " << x << " y = " << y << endl; } return 0; }
Salida esperada:
Método: Runge Kutta
#include <iostream> #include <cmath> using namespace std; double f(double x, double y) { return x * x - y * y; } int main() { double x = 0, y = 1, h = 0.1; for(int i = 0; i < 5; i++) { double k1 = h * f(x,y); double k2 = h * f(x + h/2, y + k1/2); double k3 = h * f(x + h/2, y + k2/2); double k4 = h * f(x + h, y + k3); y = y + (k1 + 2*k2 + 2*k3 + k4) / 6; x = x + h; cout << "x = " << x << " y = " << y << endl; } return 0; }
Salida esperada: